Brief summary of my experiments

|
| Prototype |
1 |
| Started/End Dates |
Jan 1995 |
| Description |
It all started off with this very simple model made from matck sticks. At the
time I just wanted to visually try and understand in 3D. It was very helpfull.
|
|



|
| Prototype |
2 |
| Start/End Dates |
31-1-1995 to 3-2-1995 |
| Description |
Very simple prototype using jam jar lids (heavy outer rim) for gyroscopes and
high rpm DC motors.
It now seems a silly attempt, but at the time I hadn't see a gyroscope running
and I had very little in the way of engineering knowledge. It was simply a case
of switching the device on to see if there was any obvious lift. The device was
too unstable to test for weight loss and I decided that it would be create
something new and better designed. I do remember one of the jam jar coming off
from the motor axle and for a very small mass it surpised me by the force the
gyroscope/lid contained.
|
|



|
| Prototype |
4 |
| Start/End Dates |
Summer 1997
|
| Description |
Made out of toy gyroscopes, pillar drill as motor (not shown), Balsa wood for struture.
A slow speed test was carried out using the pillar drill but it broke one of the 'arms'.
I decided that whole idea was to flimsy. |
|
<

|
| Prototype |
5 |
| Start/End Dates |
19-11-1996 to Never finished
|
| Description |
This was started but never finished. I could have gone on
and completed it but I now have access to pre-built (but smaller) gyroscopes.
Building everything part-by-part takes a long time. Another reason for not
finishing it is the fact that I want to go back to studying a single gyroscope.
Hence this was never finished.
|
|



|
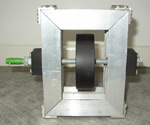
| Prototype |
6 |
| Start/End Dates |
31-3-1999 to 3-3-2000
|
| Description |
4 high speed gyroscopes running upto 29,000rpm~
The gyroscopes are hinged, but with a lock to stop them moving
beyond a fixed angle. The whole structure is rotated while
the gyroscopes are spinning.
The device simply failed to produce any significant propulsion force.
I even tried running the gyros anti-clockwise with the
structure running clockwise (still pushes the gyros inwards).
The gyroscopes ended up weighing 80g each with the whole device
weighing 2815g including all motors but without power supplies.
As far as the build quality of the device is concerned this is in many
ways the best I've made so far. The gyroscopes run smoothly when the
whole structure is moving or still, with little vibration. They are also
better aligned with one another.
The device did change weight at points to 2810g and 2820g but
this change was for only short periods of time and could be produced
by the quite large air movements of the gyros. The changes also went
up as well as down which is not good news.
I stopped running tests on the device because the gyroscopes
were beginning to warp/bend the structure (even using quite thick alu)
and cause problems on the hinges. The gyros were applying stress
internally in the structure by trying to fold it rather than produce
pure propulsion. Because the gyros are directly
seated on the motors, the motors take any stresses from the
gyros. Although there didn't seem to be any problems
occurring to the bearings in the motors, I didn't want to push my luck
running tests until something did break
|
|


|
| Prototype |
7 |
| Start/End Dates |
Early 2000
|
| Description |
This prototype is loosely related to prototype 5 but this
one was finished (pictures show it taken apart). It was flawed in its concept
so did not work. The outcome of this prototype has made me go back to studying
single gyroscope configurations.
|
|
You can fill in the form on the home page and I will
let you know when this page is updated.
|

















